管片变形对静力水准高程传递的影响研究
作者:潘国荣;汪大超;
地铁隧道的局部形变中,沉降形变量作为安全监测的一项非常重要的指标,研究其形成机理和原因具有非常重要的意义。通常在地铁隧道的周边由于其他工程项目施工或环境因素引起周围土体的变形和位移,会造成地铁隧道的附加变形,主要分为隧道结构的整体位移和隧道局部变形两种。
静力水准系统作为一种高精密液位测量系统适用于测量多点的相对沉降,在大型工程建设和运营维护中有广泛的应用基础。受地铁隧道环境限制在进行长距离静力水准监测时,应根据隧道坡度布设一定数量的转点传递高程。在长期监护实践中发现,布设在同一环片上用于传递高程的两台静力水准仪的监测数据有时存在不匹配的现象,本文将探讨影响静力水准系统转点处沉降数据一致性的原因。
1 静力水准系统高程传递原理
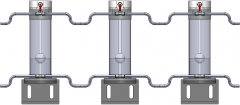
静力水准系统的结构由静力水准仪及安装架、液体连通管及固定配件、干燥管、液体等组成,具有监测点多、测量范围广、精度高、数据自动化采集等优点。其测量原理是根据连通管原理,用传感器测得每个容器内容器底面安装高程与液面的相对变化,再通过计算求得各点相对于基准点的相对沉降量。据连通管原理,要求在设备安装时将仪器安装在同一水平面上。然而受限于隧道内的的复杂环境以及隧道自身的坡度角,在进行长距离静力水准监测时,需布设一定数量的转点,即在同一里程的管片环上安装高程不同的两台仪器实现高程传递。
静力水准系统,地铁隧道坡度与水平面成 α 夹角,则在架设仪器时需要设置转点用来传递高程值。Z0 表示基准点安装位置,A1、A2、A3、A4 表示安装位置处于同一高度的静力水准仪,互相之间用液体联通管和数据线连接,同理 B1、B2、B3、B4、B5表示处于另一安装高度的静力水准仪。处于转点位置的仪器 A4 和仪器 B1 安装在相同里程的同一管片上,高差为 h。当将该处的一环管片看做体时,则A4 和 B1 的相对沉降量固定,可以进行高程传递推算出其他静力水准仪相对于基准点 Z0 的沉降量。然而在实践中发现在少数时段以及部分环境下转点间的监测数据不完全匹配,这将影响静力水准系统高程传递的质量,需要根据监测环境分析原因。
2.管片变形对高程传递精度的影响由于地铁隧道管片在长期使用后老化或受不均匀外力影响产生局部变形,此时管片不能完全当做一个刚体,会导致管片上不同高度的仪器之间的相对位置发生变化,沉降观测值不一致。管片变形导致的高程传递误差具有一定的规律性和重要的监测价值。
2.1 管片收敛变形
当地铁隧道周围土体受力不均时会引起地基弹簧系数变化,造成隧道横向收敛变形。当隧道收敛较大时会造成管片侧壁不同位置的相对高差关系发生改变,并且收敛越大对结构高差的影响越大,则计算高程传递的差值也越大。计算可得,当隧道水平收敛值为 5 mm 时,取隧道短半径为 2. 75 m,则距离隧道底部1.5 m 高度安装的仪器将抬升 4.78 mm,距离隧道顶部 1.5 m 高度安装的仪器将下降 4.78 mm,则两台仪器的相对高差变化可达到 9.56 mm。
2. 2 管片旋转变形当地铁隧道处于软土层中,或由于注浆产生自身旋转等情况会使得隧道管片旋转变形,会导致静力水准转点的相对位置关系产生变化。
隧道旋转引起的仪器相对高程变化与隧道旋转角度和仪器的安装高度以及位置有关。
在工程应用中,隧道旋转角往往无法直接测得,可通过测量同一管片两个收敛点之间的高差与初始高差差值来计算旋转角的估值。通常隧道轨道面距离隧道中心的高差为 2.27 m,隧道长半轴为 2.75 m,代入式得,当旋转角等于 0. 5° 的时候,转点间的相对高差误差可以达到 24 mm,当旋转角为 1 分时的相对误差值为 0. 8 mm。
2.3 管片裂隙的影响
隧道管片的开裂深度变化会影响管片的结构和受力特性,导致开裂管片上不同位置的沉降值不同。在盾构管片存在裂缝的情况下,管片的最大应力值、水平和竖向收敛值、竖向沉降值均会随土压力系数、地基弹簧系数的减小而增大,同时随地下水位埋深的增大而增大。因此,在存在裂隙的管片上布设静力水准转点时,会由于裂隙引起管片不均匀变形,导致高程传递误差增大。
根据《混凝土结构设计规范》设置实验参数,采用三维 Goodman 单元法建立分析模型,在实验管片环的左侧管片上布置一条宽度 0. 45 mm,深度120、300 mm 共2 组不同深度的裂缝,在封顶管片上布置宽度 0. 53 mm,深度分别设置 60,150,240,300 mm 共 4 组不同的深度值模拟实验。
试验可知,当裂缝位于管片顶底部时,管片收敛变形最严重,随着裂缝深度增加,管片的水平及竖向收敛略有增加,但变幅不大。当裂缝深度为60 ~ 300 mm 时,盾构管片的水平收敛值为3. 80 ~4. 10 mm,顶底部竖向收敛值为 5.13 ~ 6.02 mm。在安装静力水准仪时,应考虑既有裂隙的管片收敛变形的影响,尽量避免在有裂隙的管片上布设转点。在监测过程中如果出现管片裂隙影响静力水准高程传递精度,管片裂隙对管片收敛的影响值,根据公式对测量结果进行修正。
3 工程实例
地铁某运营区间段附近由于深基坑开挖,于2014 年5 月8 日至 2014 年7 月9 日使用静力水准系统监测该段地铁隧道的沉降变形,转点处静力水准仪编号为 XSL8 和 XSL9,两台静力水准仪在该时段的沉降值观测曲线可以看到,2014年 6 月 7 日以前两台仪器的沉降观测数据基本相同,2014 年 6 月 7 日以后虽然 XSL8 和 XSL9 的沉降趋势一致,但 XSL9 的沉降量变化明显大于 XSL8。经现场分析发现,因 XSL8 和 XSL9 所处管片出现裂缝,引起隧道收敛,导致隧道变形使侧壁的静力水准仪之间的相对高差变化,导致沉降计算值差异较大,最大值为4. 5 mm,方差为2.73 mm。确定隧道裂缝造成管片水平收敛值为 3. 8 mm,两台仪器的安装高度分别为 2.35 m 和 1.25 m,取隧道半径为 2.75 m,假定隧道收敛值的大小与时间成正比,代入式经收敛修正后,静力水准各观测值的最大差值为1.91 mm,中误差为1.11 mm,2014 月 9 月,对另一地段的地铁进行注浆工程,注浆前后转点处的监测曲线图可以看出,转点仪器 2-Z15 和 2-Z16 的沉降观测趋势一致,但注浆时段对地铁管片造成了微量旋转,导致 2-Z15 和 2-Z16 观测值的差值很大,最大值为6. 30 mm,平均值为 3. 34 mm,中误差为 3.79 mm。
两台仪器的安装高度分别为 3. 03 m 和0.90 m,隧道半径为 2.75 m,由式计算得到隧道微量旋转角度为 6',假定隧道旋转的角度大小与时间成正比,代入式经修正后两台仪器各观测值差值的最大值为2. 17 mm,平均值为0.82 mm,中误差为 0.96 mm。在静力水准监测的本区间多处高程传递中采用了该修正方法处理,使得静力水准的测量精度有明显的提高。Z1-Z6 号静力水准仪与基准点安装在同一高程,不需要高程传递修正; Z7,Z8号点为第一处高程传递点,经修正后 Z8 点的精度提高了 27% ; Z15,Z16 为第二处高程传递点,修正后 Z16 精度提高 23% ; 其他点位经过高程传递精度修正后精度分别有不同程度的提高,且高程传递越多的点位精度提高越大,验证了本文提出方法的有效性上,隧道管片的旋转变形和收敛变形会对长距离静力水准的高程传递产生较大影响,管片变形对静力水准高程传递的影响具有规律性和可监测性,可以采取有效措施来修正其对观测量的影响,这对提高自动静力水准测量的精度,有重要的指导价值。
4 结论
随着全国地铁建设的推广,静力水准系统作为地铁隧道安全监测的重要监护手段,研究其测量误差和精度具有非常重要的现实意义。本文从管片变形分析了导致长距离静力水准系统高程传递误差的影响规律,并结合工程实例重点分析管片变形对静力水准高程传递的影响和修正。提出提高静力水准数据精度的一些方法,为静力水准系统的数据分析和处理提供一定的参考。
管片收敛变形引起的高程传递误差,可根据管片的水平或竖向收敛值,参照式计算高程传递误差修正值。在实际工程中虽然无法直接测得监测点距离隧道中心的高差,但可以根据监测点距离轨道面的高差和隧道的设计参数计算出监测点距离隧道中心的高差值。
管片裂缝对高程传递误差的影响可以根据裂 缝深度估算出隧道水平或垂直收敛值,再根据管片收敛的误差修正公式提高高程传递精度。管片旋转变形引起的高程传递误差,可根据式计算出近似旋转角再带入式可得到高程传递误差修正值。
本文章转自爱学术(aixueshu.com),如有侵权,请联系删除
上一篇:磁致伸缩液位计信号拾取方法的研究与实现
下一篇:高压型磁翻板捆绑磁致伸缩组合式液位计研究
.png)
.png)