静力水准在地铁隧道结构自动化监测中的应用
作者:吴国晓;程明;
对于大部分工程的监测工作,竖向位移监测是最重要的一项内容之一。无论在基坑施工监测中,还是在隧道结构的监测中,结构发生破坏之前,竖向位移必然会发生不同程度的变化。目前,竖向位移的监测方法主要为人工观测,即主要采用水准仪进行观测,不仅工作量大,效率低,而且无法实现实时、在线监测,因此不能及时发现问题、消除隐患。
静力水准自动化监测系统作为一种精密的水准测量方法,具有精度高、自动化性能好等特点,完全可以弥补传统方法的漏洞,同时可以更好地运用于人工无法长时间作业的某些特殊环境,可以实现实时、在线监测,使得在工程进展过程中能够及时发现问题,消除隐患。
1 静力水准原理
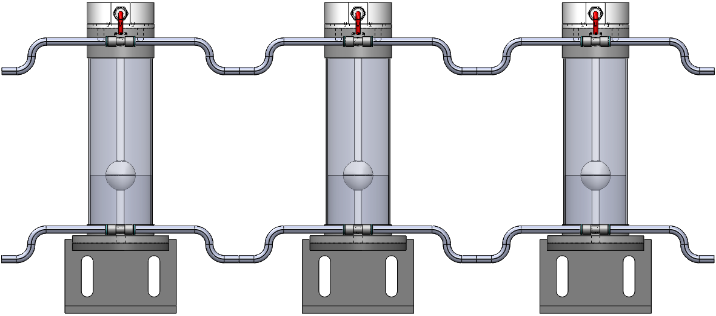
该系统主要由静力水准仪和静力水准管路组成,静力水准仪包括主体容器、连通管、传感器等部件。静力水准仪是利用连通液的原理进行沉降观测,多支通用连通管连接在一起的储液面总是在同一水平面上,通过测量不同储液罐的液面高度,经过计算可以得出各个静力水准仪的相对差异沉降。用传感器测量每个测点内液面的相对变化,通过计算求得各点相对于基点的相对沉降量,并与基准点相比较即可求得测点的绝对沉降量。
2 国内外现状
当前国内外制造的多种型号的流体静力水准仪,可用于工程建筑物和沉陷观测、大坝坝体监测等。国家地震局地震研究所的 DGIA 型( 目视型) 仪器,两测头之间高差的测量中误差优于± 0. 07 mm,DG2( 自动型) 仪器的灵敏度达到 10 - 7。国家地震局香山台使用的流体静力水准仪的测量精度达到 ± 2 μm ~± 3 μm。
目前,流体静力水准仪的数据自动采集主要采用磁致伸缩式传感器。对于静力水准在地铁隧道内的应用,国内外许多学者作了大量的研究工作,取得了许多有价值的结论,为科学评价城市地铁施工对邻近环境的影响和周边环境变化对地铁稳定性的影响提供了理论基础。但由于城市地铁隧道施工方法的多样性,以及工程地质、水文地质条件的差异性、复杂性,且由于地铁营运产生的震动和风动都对监测数据的准确性产生一定影响等因素的存在,如何实时、准确的获取监测数据进行预警、预报,尚有许多技术问题需要进一步研究解决。同时,各种自动化监测传感器的通讯及数据采集软硬件整合也成了急需解决的问题。
3 工程案例
3. 1 工程概况
某城市综合交通枢纽区地下道路工程与既有地铁 1 号线有4 处交叉。4 个交叉点分别位于两个盾构区间内。由于市政道路施工需要进行基坑开挖,且开挖深度距离地铁隧道管片埋设深度距离不到 3 m。因此,开挖施工对地铁隧道有较大的影响,需要对基坑开挖影响范围内的地铁隧道进行实时监测,及时掌握地铁隧道的变形情况。
3.2测点布设
在本工程中,计划在以上 4 个交叉点处,即 1 号、2 号、3 号、4 号交叉点,市政道路中线位置对应的地铁隧道部位下方安装一台静力水准仪,沿地铁路线前后各 10 m,15 m 位置各布置 1 台静力水准仪,共 5 台静力水准仪,加 1 台基准点,共 6 台静力水准仪。在 4 号位置处,因交叉位置较长,沿地铁隧道前后外延 15 m 处各增加 1 台静力水准仪,即布置 7 台静力水准仪,加 1 台基准点,共8 台静力水准仪。上下行线布置方案相同 4 个交叉点与地铁上下行线合计有 8 个交叉位置需要布设测点,合计需要布设 52 台静力水准仪。
3. 3 数据分析
根据土建方提供的工期进度,4 个交叉点的施工进度如下:
1) 1 号交叉点在 2014 年 8 月份开始施工,开挖后因变形量超限,采取回填加压措施,停工。自 2015 年 1 月 10 日重新开始施工,至 2015 年 2 月初基本施工完成;
2) 2 号交叉点自 2014 年 12 月中旬开始施工,至 2015 年 1 月底施工完成;
3) 3 号交叉点自 2014 年 12 月 15 日开始施工,至 2015 年 1 月份初基本施工完毕;
4) 4 号交叉点最先开始施工,自 2014 年 8 月份开始施工,至2014 年 10 月份施工完成。
静力水准仪每隔5 min 采集 1 次,每天 24 h 不间断采集数据,考虑到白天列车运营对静力水准仪影响比较明显,曲线波动较大,列车停运后曲线平稳,基本稳定在相同的测量值,为剔除列车运营对数据的影响,在进行沉降分析时采用零点左右的数据,这一时段内除有隧道内施工的微小影响外,基本没有其他因素干扰,其他时段数据作为隧道突发沉降的参考,以达到实时监测的目的。
根据上部施工情况,在地表开挖时,隧道结构上的静力水准测点都出现了程度不同的抬升,各测点观测数据分析如下:
1) 1 号交叉点。左线: 7 月初开始观测,土建施工未进行开挖施工,各测点稳定。8 月份开始开挖施工后,各测点开始缓慢抬升,左线至 2015 年 1 月中旬抬升达到最大值,其中变化量最大的点为测点 3,最大抬升量为 12. 98 mm 。右线: 7 月初开始观测至 2015 年 10 月中旬抬升达到最大值,其中变化量最大的点为测点 3,最大抬升量为 9. 24 mm。后期随土建回填施工抬升量逐渐减小 。
1 号交叉点处静力水准监测点自 2014 年 7 月 9 日地面施工后开始变形,自底板浇筑完成之后,隆起变形量不再增加,随着上部结构的完成,隆起变形量逐渐变小,并趋于稳定。
2) 2 号交叉点。左线: 该处交叉点于 2014 年 12 月份开始施工,开始施工后,各测点有较小的变形,各测点最大抬升量都在6 mm 之内。在 1 月初开挖到底后 2 号左线几个测点未出现明显抬升。变化量最大的点为测 2,最大变化量为 4. 2 mm。右线: 在该交叉点施工之前,因交叉点周边施工,各测点都有小幅的变形,在开挖之前,最大抬升量都在 6 mm 之内。在 1 月初开挖到底后 2 号右线几个测点在 2015 年 1 月中旬开始呈上升趋势,且几个测点趋势一致。其中,变化量最大的点为 2 号右测 4,最大抬升量为 9. 49 mm 。
2 号交叉点自 2014 年 12 月中旬开始施工,至 2015 年 1 月底施工完成,该交叉点在地表施工期间整体变形量较小。
3) 3 号交叉点。3 号交叉点自 2014 年 12 月 15 日开始施工,至 2015 年 1 月份初基本施工完毕。在该交叉点施工之前,因交叉点周边施工,该处左、右线测点都有小幅的抬升,在开挖之前,最大抬升量都在 6 mm 之内。在 12 月中旬开始开挖后,左、右线各测点抬升趋势明显,尤其是布置于中部位置的测 2、测 3、测 4 抬升趋势明显,且左、右线变化趋势一致 。
因 3 号交叉点施工速度较快,造成变形速率较快。根据静力水准数据可以看出,在交叉点开挖当天,最大变形速率达到3 mm /d。在整个开挖期间,左线最大变形量为 + 12. 07 mm,变形点为 3 号右测 3,时间为 2014 年 12 月 20 日,当前变形量为5. 21 mm,右线最大变形量为 9. 78 mm,变形点为 3 号左测 2,时间为 2014 年 12 月 39 日,当前变形量为 6. 66 mm。
4) 4 号交叉点。该交叉点最先开始施工,自 2014 年 8 月份开始施工,至 2014 年 10 月份施工完成。在施工过程中,根据结构变形情况,曾经停工一段时间进行堆载加压。在 10 月初开挖至基底,各测点测值大部分在 10 月中旬达到峰值,各测点变化趋势一致,尤其是左线数据反映更明显。其中变化量最大的点为 4 号右测 5,最大抬升量在 2014 年 10 月 19 日达到 10. 19 mm。后期随着上部施工,各测点开始逐渐下沉,尤其是 4 号右测 5、测 6、测 7 三个测点,在开挖期抬升量很小,最大不超过 5 mm,后期因上部施工开始持续下沉,其中,下沉量最大的点为 4 号右测 6,在 2015 年1 月 20 日最大下沉量为 - 13. 51 mm。
3监测结论
1) 在安装调试过程中,连接液体总量增减正在 ± 30 mL 以内即可满足监测要求,尽量保证各测点罐体内液体处于中间状态,避免非线性误差。
2) 静力水准系统能够及时反映出地表施工情况,尤其是在地表迅速减荷过程中,变形明显,且时效性很强。
3) 各个交叉点上行线和下行线数据都有一定的相关性,这与地表施工情况也比较相符。
4) 能够及时提供预警。在 2014 年 10 月5 日,在隧道监测区域上方开挖施工的过程中,通过数据实时监测到 P3-3 点的累计变化量达到了 12. 07 mm,立刻采取报警,通过对监测数据进行分析,要求施工现场采取抽条开挖,并对开挖部分采用沙袋加压。该措施有效的控制了变形量,预防了危险的发生。
5) 在地铁上部施工过程中 4 个交叉点处均出现了相同的变形规律: 隧道结构随着上部结构的开挖出现不同程度的上浮,上部开挖至底板浇筑完成时,隧道结构不再上浮,在上部结构施工时,隧道结构开始缓慢下沉,上部施工完成后,隧道结构变形趋于稳定。
4、结语
1) 采用静力水准仪监测运营期地铁结构变形,具有实时化、自动化、高效化、高精度等特点,具有较好的应用价值。
2) 仪器安装过程中已考虑温度影响因素,且静力水准测点误差不传递,所以正常工作范围内温度变化对系统本身影响很小,温度修正系数远远小于最小读数,可忽略温度对系统的影响。
3) 静力水准系统管路长短对监测结果也有一定的影响,系统应尽量控制距离,距离过长则调试越复杂,数据滞后性也会越明显,要根据实际情况适当调整,提高静力水准系统的使用效果。
本文章转自爱学术(aixueshu.com),如有侵权,请联系删除
上一篇:磁致伸缩位移传感器电路系统的设计
下一篇:基于磁致伸缩传感器的液位连续控制系统设计
.png)
.png)











