压力和温度对静力水准系统精度影响分析
作者:何晓业;黄开席;陈森玉;刘祖平;赵营海
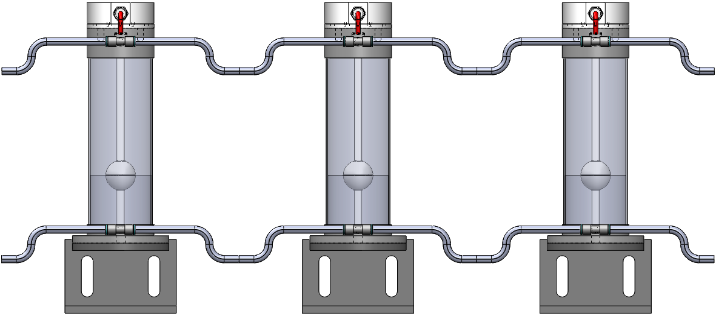
高精度静力水准系统(Hydrostatic leveling system,HLS)是利用相连的容器中液体总是寻求具有相同势能的水平原理来测量和监测参考点彼此之间的垂直高度的差异和变化量。HLS 系统传感器的基本原理并不复杂,用管道连接的容器中注入一定的液体,所有的容器中的液体将在管道中自由流动,其结果是当平衡或者静止时各个容器中的液体表面将保持相同的高度,但是各个容器中的液体深度并不相同,这也就反映了各个容器所在的各个参考点的高度的不同。
HLS 在世界各地的电子加速器装置、核电站以及重要城市建筑中得到广泛应用,它能实时监测重点部件和建筑物的不均匀沉降,精度达到微米级。我国目前在建的中国科学院高能物理研究所BEPCII 重点工程对适合我国国情的高精度静力水准系统的研究给予了资金支持。影响HLS 的测量精度的因素有很多,本文主要讨论环境压力和温度的变化对系统精度的影响,以及消除这些影响所采取的措施。
1 压力因素干扰分析
钵体中的液体液面的高度取决于钵体中的大气压力,对于系统里两个钵体有关系式: p1+ρ1g1H1=p2+ρ2g2H2=C式中p1、p2 分别是两个钵体液面上的大气压,ρ1、ρ2是两个钵体中的液体密度,g1、g2 是两个钵体所在位置的重力加速度。可以看到,假如静力水准系统中使用同样的液体,其密度一致,系统的空间分布相对于引起重力加速度有明显变化的空间距离来说,在一个比较小的范围内使用,可以认为重力加速度g 保持不变,则由压力不同而产生的液面高度变化为:?H=H1-H2=(p2-p1)/ρg所以,对于静力水准系统的精密测量,压力的影响是特别大的。要消除由于压力的不同而产生的测量误差,一种方法是,在每个钵体中安装压力传感器,然后用一个一次项公式作理论上的修正。设在一个钵体中有个压力的变化为?p,由这个压力变化而产生的液面高度的变化为?H,则有以下关系式:p+ ρ gH+=(p+?p)+ρg(H++?H)式中,p 是原来的压力,ρ、g 分别是液体的密度和重力加速度,化简得:?H=-?p/ρg每个钵体中压力传感器测量得到的压力变化可用上式进行校正。这种方法有其不利的地方。一是每个钵体中必须安装压力传感器,增加了加工成本;二是压力传感器的数据需要不断采集、处理,增加了数据采集系统和处理系统的成本和计算的复杂性;三是安装压力传感器以后势必使单个钵体的体积变大,不符合尽量使钵体体积更小的原则。
消除压力变化引起的误差的另一个办法是用密封的气管连接钵体,这样能够保证整个测量系统在相同的压力下。本系统就是采用了这个方法。如果不采用密封的系统,将有很多因素影响到压力的变化,这些变化可以是短暂的,也可以是局部的,也可能在一定时间段内是变化的。比如,由于测量系统所在的现场的人员的走动可能引起局部的压力变化,还有门窗的开和关可引起气流的变化从而引起压力的短暂变化,而气候的变化可能引起压力在一定时间段内的变化。有资料显示,采用了密封的系统以后,在数百米的范围内,系统内的压力基本保持不变且并不影响测量精度。
2 温度因素干扰分析
液体的密度是随其温度变化而变化的,液体密度的变化也改变了液体的体积,在HLS 中,如果整个系统的温度变化率和变化量是一致的,那么对测量的精度是没有影响的,因为各个部分的体积变化是一样的,每个钵体中的液面是一起升高或者降低同样的高度,不影响测量的结果。但是在系统中如果出现局部的或者不均匀的温度变化,情况就不同了,由于温度的变化,产生液体的密度变化,那么在不同的钵体中液面的高度产生不同量的升高或者降低,就严重地影响了测量的精度。以水为例,在20℃时,水的线膨胀系数是 200μm?(m?℃)-1,所以对于一个容器中有 100mm 深的水,在 20℃附近有1℃的温度变化,将会产生±20μm 的液面高度的变化。这个变化量对静力水准测量来说是非常大的,本系统的允许误差小于这个量,所以对温度变化产生的测量误差必须加以修正。
对于在 HLS 中的温度不均匀变化主要研究两种情况:一种是液体连通管中的温度梯度在管道不水平铺设的时候对测量的影响;另一种是测量钵体所处位置的温度变化所产生的影响。
2.1 连通系统的温度梯度对测量的影响
以两钵体组成的一个测量系统为例,并设两个钵体的内径一样。由液体静力学方程可以得到: p 1+ ρ1g1H1= p2+ρ2g2 H2 =C式中p1、p2 为两个容器中的大气压力,这里认为它们是相等的;g1、g2 是重力加速度,它们也是相等的;在这个系统中虽使用同一种液体,但是由于存在温度梯度,使两个容器中的液体的密度不同,ρ1≠ρ2,则有: ρ1H1=ρ2H2=C由于温度梯度的存在而产生的液体表面的高度差为:?H=H2-H1,若:?t=t2-t1两个钵体在同一高度,水管有 h 米的高差,则当T1 在20℃时有关系式: ?h=200μm· (h[m]·?T[ ℃]) 可以得到,对于 T1(H)和 T2(H)分别有 1℃的温差,水管有0.2mm 的高差时,温度对钵体中液体高差的影响约为 0.04mm,这个误差对于水准的精密测量影响是很大的,所以,一种方法是用计算数据加以改正,即:h真=h+?H另一种方法是在铺设 HLS 的时候保证水管和容器尽量在一个水平面上,减少高度差,避免温度梯度的影响。一种方法是在铺设 HLS 的时候保证水管和容器尽量在一个水平面上,减少高度差,避免温度梯度的影响。
2.2 钵体温度不同对测量的影响
在加速器的现场使用 HLS,保证水管铺设的水平并不困难,这样水管上存在的温度梯度的影响可以消除而不加考虑。但是各个钵体所在的位置的温度是很难一致的,例如,加速器储存环中的热源很多,真空泵、冷却水管的分布相对静力测量的钵体来说不均匀,这样钵体中的液体的温度就会有差异,就是同一个钵体的温度也是随时间而变化的,这样的后果是,即使测量位置的高程没有发生变化,但是由于温度的变化也会引起测量读数的变化,如果这个变化超过了测量精度允许的范围,其测量结果就会存在很大误差,所以必须采取方法对这个误差加以改正。
温度变化引起液面高度变化的原因,是由于液体的密度随温度发生了变化。以水为例,在5—30℃范围内密度的变化曲线可以看出这条曲线不是线性的。在20℃左右水的线膨胀系数为200μm(m?℃)-1,所以如果钵体中水的深度为50mm,那么如果有1℃的温度变化,就会产生±10μm 的读数误差。对本静力水准系统,钵体中水的深度大约在 70mm 左右,这样在 20℃左右就会有±14μm(℃)-1的读数误差。为了消除这些误差,本系统在在每个钵体中都安装有温度传感器,系统的每次采集数据都同时得到每个钵体的测量数据和温度读数。
液体的膨胀系数是和液体的温度——密度函数相对应的函数,所以理论上严格的修正函数应该是高于二次曲线的函数,如果考虑到钵体本身的热胀冷缩和其他零部件的温度因素,很难在理论上计算出精确的修正函数。最常使用的方法是对单个钵体做温度实验,取得实验结果曲线,通过多项式拟合而得到修正函数,然后代入数据采集软件中,通过计算对测量结果加以修正。但是在具体实验时也遇到问题,因为做温度实验的条件要求非常苛刻:钵体必须放置在温度可控的、可以缓慢变化的实验环境下进行,为得到这些条件的各方面投入是可想而知的。所以在做这个实验的时候,只有利用实验室夜晚的自然温度的变化得到在很窄的温度范围内的数据和相应的曲线。
这个曲线的线性拟合公式为:y== -2.25505 + 0.08804yx
拟合中误差为 σ=±0.0042mm。
这个曲线的二次项拟合公式为: 42.49941-3.353yx=+ 0.06614 2 (11)x 2拟合误差为:σ = ±0.00262mm
原则上说,为了消除钵体之间温度差异而产生的误差,应该对每个钵体做温度实验和标定,得到类似于上述的拟合公式。在实际应用中,根据现场测量得到的各个钵体的温度,计算所产生的误差,然后在测量读数中减去这个误差,就得到了修正后的测量结果。但是,这里需要说明的是,正如前面所述,温度实验的条件没办法得到满足,形成这个误差的因素也比较复杂,很难找到真正精确的修正拟合公式,以上所做的实验是对温度问题的定性考察。从实验结果来看,曲线的趋势是正确的,要得到更准确的实验数据和拟合公式必须有待于今后实验条件更加成熟以后才能进行。
在实际应用中,为了尽量小地降低温度对测量结果的影响,这里采用国际上通用的方法,即以20℃时水的膨胀系数 β=200μm(m?℃)-1 为依据,假定系统的工作环境温度在 20℃左右不大的范围内波动,根据钵体中液体的近似深度 h 深(单位为 m),通过线性公式进行修正,修正公式为?h温度(μm)=β·h深·(T-20)对于工作液体是水,这公式为:?h温度=200h深·(T-20)
3、结论
大量实验以及国内外对 HLS 的使用经验表明,环境压力的变化对 HLS 的测量精度的影响可以通过使用密封的气管连接各个钵体,使各个钵体中的压力保持相等,由此而将压力差异的影响消除[4]。
为了消除环境温度差异对系统测量精度的影响,首先在布设系统的时候保证水管和容器尽量在一个水平面上,减少高度差,避免温度梯度的影响;其次,在各个钵体中安装温度传感器,通过实验拟合的办法消除由于钵体温度差异而带来的影响。
采取了上述措施以后的 HLS 系统的测量精度可以大大提高,在消除了其他因素干扰以后,系统的测量精度可以达到微米级,甚至更高。
本文章转自爱学术(aixueshu.com),如有侵权,请联系删除
上一篇:液位传感器用磁致伸缩 FeCo 合金特性研究
下一篇:磁致伸缩位移传感器的设计与实现
.png)
.png)











